Ajoneuvojen autonominen ajaminen yleistyy nopealla tahdilla eri muodoissaan. Useimpien autonvalmistajien ajoneuvot voidaan varustaa nykyään kuljettajaa avustavilla toiminnoilla, jotka osaavat parhaimmillaan ajaa autoa täysin itsestään. Ainakin lyhyen aikaa kerrallaan hyvissä olosuhteissa.
Liikenne sujuvammaksi jaetulla datalla
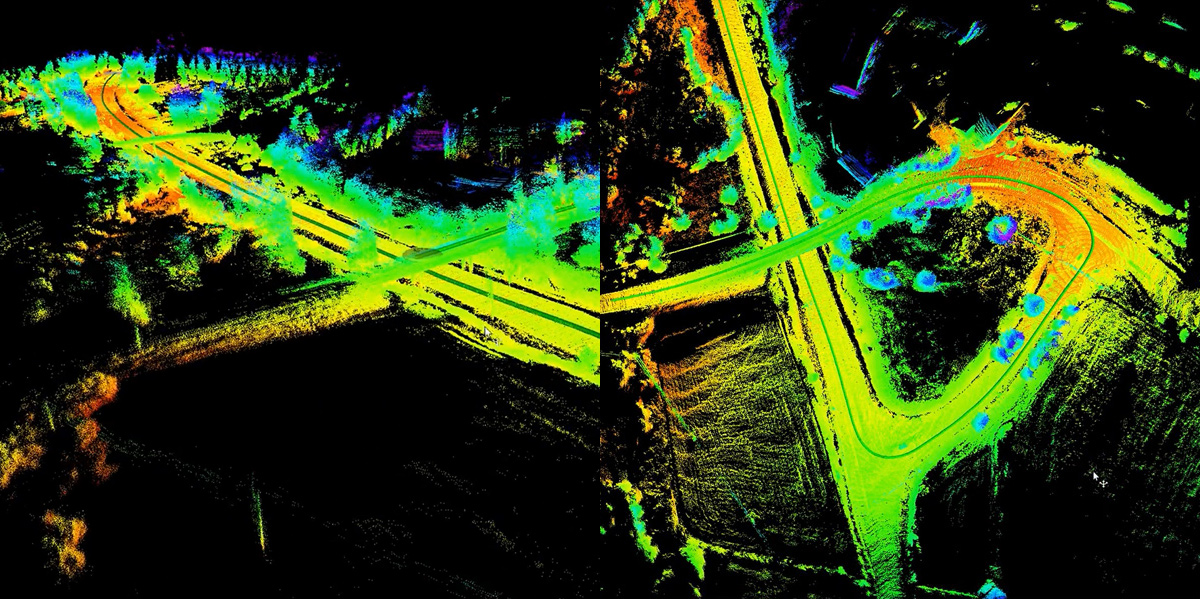
Autonomisten toimintojen saavuttamiseksi on ajoneuvoissa tyypillisesti useita erilaisia tieympäristöä havainnoivia sensoreita, kuten kameroita, laserkeilaimia sekä radiotaajuus- ja ultraääni-etäisyystutkia. Sensorit tuottavat liikenneympäristöstä suuria määriä tarkkaa ja ajanmukaista tietoa, jota voidaan verkon yli jaettuna hyödyntää paikkatiedon automaattiseen päivitykseen. Jokaisesta tieliikenteessä liikkuvasta ajoneuvosta tulee ikään kuin tarkkuusmittalaite, jolloin paikkatietoa voidaan kerätä sujuvasti liikenteen sivutuotteena.
Tieympäristöstä kerättyä sensoridataa on mahdollista jatkokäsitellä ja käyttää monitahoisesti: tienpidollisten toimenpiteiden määrittämiseen, tieolosuhteiden tarkkailuun, karttatietojen jatkuva-aikaiseen päivittämiseen ja yksityis- sekä joukkoliikenteen sujuvuuden optimointiin. Ennen kaikkea tiheästi liikenteen mukana päivittyvä paikkatieto tuo merkittävän parannuksen liikenneturvallisuuteen, kun onnettomuudet ja poikkeamat voidaan saattaa nopeasti viranomaisten ja muiden tienkäyttäjien tietoon.
Lumisade tuo haasteita
Paikkatietoa voidaan kerätä liikenneympäristöstä automaattisesti hyödyntämällä laskennallisia menetelmiä, joita yhdistelemällä saadaan aikaan ajoneuvoille autonomisia ominaisuuksia. Paikkatiedon keräämiseen liittyvien kysymyksien tutkimus auttaa ratkaisemaan monia itsestään ajavien autojen suorituskykyyn ja luotettavuuteen liittyviä seikkoja.
Teknologian suurimmat haasteet liittyvät autonomisten ajoneuvojen kykyyn ymmärtää ja hahmottaa toimintaympäristöään vaikeissa olosuhteissa, kuten lumi- tai vesisateessa, tai kun ympäristö muuttuu vuorokauden- ja vuodenaikojen mukaan. Järjestelmän täytyy toimia yhtä lailla myös vaikeissakin olosuhteissa. Tämä asettaa ajoneuvojen sensoreille ja tiedonkäsittelyyn käytetyille laskennallisille menetelmille korkeita vaatimuksia, minkä johdosta aihepiirin nykyisiä menetelmiä ja ratkaisemattomia kysymyksiä on äärimmäisen tärkeää tutkia.
Autokin tarvitsee useamman aistin
Autonomisella ajoneuvolla täytyy olla kyky ymmärtää ja tulkita ympäristöään sensorihavaintojen pohjalta. Sensorien tuottamasta informaatiosta olisi hyvä saada poimittua irti kaikki hyödyllinen tieto sujuvan ja turvallisen ajomatkan takaamiseksi sekä käyttökelpoisen paikkatiedon keräämiseksi.
Autonomisten järjestelmien havainnointikykyä on helppo verrata ihmisen havainnointikykyyn: ihmisen havainnointikyky on rajallinen, kun käytössä on vain yksi aisti. Useampaa aistia hyödyntämällä ihminen saa luotettavamman käsityksen ympäristöstään. Myös laskennallisten menetelmien on helpompi luoda luotettavampi käsitys ympäröivästä maailmasta, kun käytössä on useita erilaisia sensorityyppejä, jotka mittaavat ympäristön fysikaalisia suureita toisiaan täydentävillä mittaustavoilla.
Sensoreista saatava informaatio voidaan yhdistää sensorifuusion keinoin esitysmuotoon, jossa erityyppisten sensorien mittaukset ovat helposti käsiteltävissä. Yksinkertaisimmillaan mittaukset voidaan muuntaa yhteiseen koordinaatistoon.

Ympäristöä pitää pystyä tulkitsemaan
Yhteinen koordinaatisto on usein käytössä esitystapana, kun sensoridatasta halutaan luokitella ympäristön kohteita eri kategorioihin. Tieympäristön havainnoinnin kannalta tärkeitä kategorioita ovat esimerkiksi henkilöautot, jalankulkijat, pyöräilijät, liikennevalot, liikennemerkit sekä kaistaviivat. Ympäristön kohteiden luokitteluun on monta hyvää menetelmää, mutta kaikista suorituskykyisimpinä voidaan pitää koneoppimispohjaisia algoritmeja, kuten neuroverkkoja.
Koneoppimisalgoritmille syötetään opetusvaiheessa suuri määrä aiemmin kerättyä sensoridataa, jossa haluttuihin kategorioihin kuuluvat kohteet on tunnistettu ja merkattu etukäteen ihmisen toimesta. Algoritmi oppii sille esitetystä datasta piirteitä, joiden avulla se voi erottaa halutut luokat keskenään.
Useimmat luokitteluun käytettävät koneoppimismenetelmät, kuten konvoluutioneuroverkot, oppivat hyödyllisiä piirteitä jo muutamista sadoista ihmisen luokittelemista harjoitusesimerkeistä. Koneoppimismenetelmien yleisiin ominaisuuksiin kuuluu kuitenkin tarkkuuden kasvaminen opetusaineiston koon kasvaessa. Laajan ja kattavan opetusaineiston luominen on siis yksi merkittävimmistä keinoista parantaa järjestelmän tarkkuutta ja luotettavuutta, mikä on tärkeää autonomisen ajamisen turvallisuuden kannalta.

Paikannuksen oltava riittävän tarkkaa
GPS-satelliittien avulla ajoneuvon paikka saadaan selville keskimäärin noin muutaman metrin säteellä sen todellisesta sijainnista. Saavutettu tarkkuus riittää erinomaisesti reittinavigointiin, jossa vaatimuksena on saada selville ajoneuvon karkea sijainti suhteessa reitin muodostaviin liikenneväyliin ja risteyksiin.
Autonomiseen ajamiseen ja laadukkaan paikkatiedon keräämiseen satelliittipaikannuksen tarkkuus ei ole kuitenkaan riittävä, vaan avuksi tarvitaan myös muita paikannusmenetelmiä. Tavoitteena on tietää ajoneuvon sijainti tarkkuudella, joka mahdollistaa ajoneuvon pysymisen turvallisesti omalla kaistallaan ilman pelkoa ajautumisesta reunakivetykseen tai esteisiin. Tarkoitus on myös antaa puitteet käyttää ajantasaista sensori-informaatiota tarkkuutta vaativiin paikkatiedon sovelluskohteisiin.
Autonomisissa autoissa käytetään SLAM-menetelmää (Simultaneous Localization and Mapping) eli samaan aikaan sekä paikannetaan kohde että kartoitetaan ympäristöä. Ajoneuvon laserkeilaimien, kameroiden ja muiden sensorien antamasta informaatiosta ratkaistaan yhtäaikaisesti ajoneuvon suhteellinen liike sekä luoda sensorimittauksiin pohjautuva kartta lähialueesta.
Ajoneuvon sijainti lasketaan peräkkäisiin sensorihavaintoihin pohjaten, minkä seurauksena sensorien mittausvirheet kertyvät merkittäväksi epätarkkuuden lähteeksi ajomatkan kasvaessa. Ajan myötä kertyvän sijaintivirheen suuruusluokka riippuu pääosin sensorin mittaustarkkuudesta, joka esimerkiksi autonomisissa ajoneuvoissa käytetyissä laserkeilaimissa on hyvä, noin parin senttimetrin luokkaa sadan metrin etäisyydellä.
Sijaintivirhe minimoidaan korjausalgoritmilla ja mittausmallilla
Sijaintivirhettä voidaan tehokkaasti pienentää käyttämällä karttapohjaisia korjausalgoritmeja, jolloin lopullinen virhe on lähes olematon. Silloin satelliittipaikannusta ei välttämättä tarvita lainkaan. SLAM-menetelmät ovat erityisen hyödyllisiä ajoneuvon paikannukseen tunneleissa ja rakennetussa ympäristössä, joissa satelliittipaikannus kärsii heikon signaalin alentamasta tarkkuudesta.
Paikannusvarmuuden ja -tarkkuuden kasvattamiseksi käytetään autonomisissa järjestelmissä useita toisiaan tukevia paikannusmenetelmiä. Yhdistämällä esimerkiksi satelliittipaikannus, kiihtyvyyksiin perustuva inertianavigointi ja SLAM-menetelmät, saadaan luotua vaikeissakin toimintaympäristöissä tarkkuutensa säilyttävä paikannusmenetelmä.
Itsenäisten paikannusmenetelmien tuottamat sijaintiarviot yhdistetään usein keskenään yhdeksi sijaintiarvioksi. Tämä tehdään matemaattisella mittausmallilla, jonka avulla yksittäisten mittausten virhe saadaan minimoitua.
Matemaattiset mittausmallit, kuten esimerkiksi partikkeli- tai Kalman-suotimet, luovat yksinkertaistetun, teoreettisen mallin mitattavan kohteen dynamiikasta. Ajoneuvon sijainnin määrittämisessä malli voisi sisältää esimerkiksi tiedon tyypillisistä ajoneuvon kohtaamista kiihtyvyyksistä sekä rajoituksista sen ohjausgeometriassa.
Mittausmallilla pyritään määrittelemään jokaiselle mittaustapahtumalle arvio mittauksen luotettavuudesta. Sitten painotetaan lopullista sijaintiarviota yksittäisten mittausten luotettavuusarvioilla. Selvästi virheelliset mittaukset voidaan tällä tavoin suodattaa pois kunnollisten mittausten joukosta. Mittausmalleissa lasketaan sijaintiarvion lisäksi myös tunnusluku sijaintitietojen luotettavuudesta, jolloin vikatilanteessa järjestelmä voidaan ohjata toimimaan asianmukaisesti.