Användningen av självkörande fordon ökar i snabb takt. Hos de flesta tillverkarna kan fordonen numera utrustas med stödfunktioner som i bästa fall är kapabla att framföra bilen helt autonomt. Åtminstone en kort tid i bra förhållanden.
Smidigare trafik med delad information
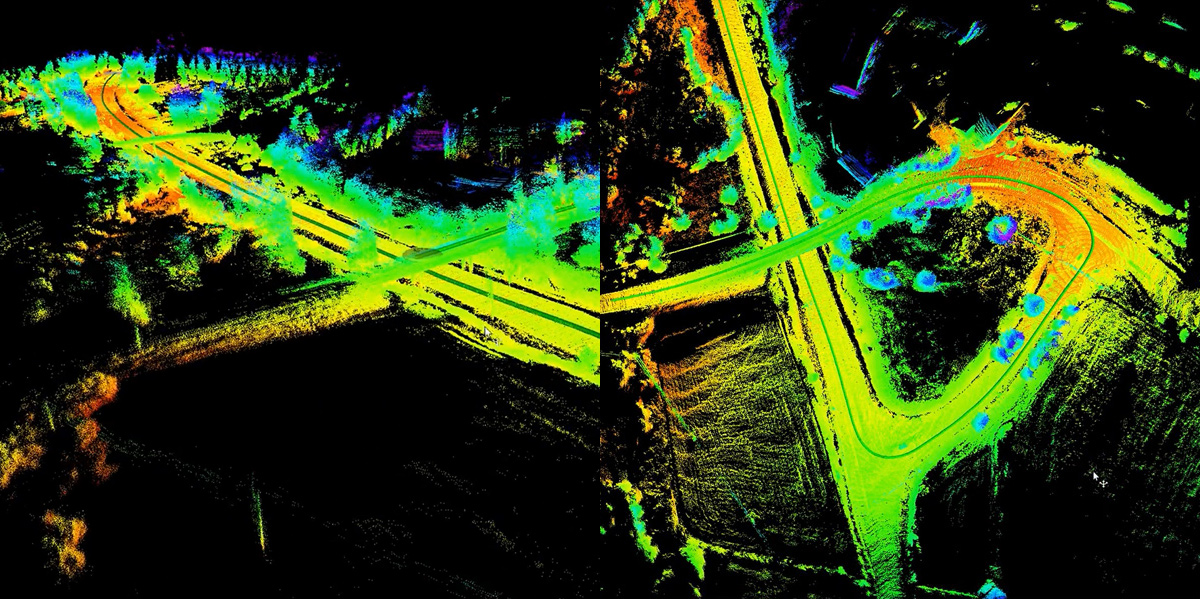
Självkörande fordon har typiskt flera olika sensorer som gör observationer av vägmiljön, bl.a. kameror och laserskannrar samt radar- och ultraljudsutrustning för avståndsbestämning. Sensorerna i trafikmiljön producerar stora mängder exakt och aktuell information som kan delas via nätet och utnyttjas för automatisk uppdatering av positionsinformationen. Varje fordon i vägtrafiken blir ett slags precisionsmätinstrument och som biprodukt av trafiken kan positionsinformation samlas in på ett smidigt sätt.
Sensorinformation från vägmiljön kan bearbetas och användas av många aktörer: bl.a. för åtgärder inom väghållningen, övervakning av väglaget, kontinuerlig uppdatering av kartinformationen och optimering av privat- och kollektivtrafiken. Framförallt positionsinformation innebär en betydande förbättring av trafiksäkerheten när informationen uppdateras tätt så att myndigheter och trafikanter snabbt får vetskap om olyckor och avvikelser i trafiken.
Snöfall medför utmaningar
Positionsinformation kan samlas in automatiskt från trafikmiljön när man kombinerar olika beräkningsmetoder för att ge fordonet autonoma egenskaper. Många prestanda- och tillförlitlighetsfrågor kring självkörande bilar kan lösas med hjälp av forskning rörande insamlingen av positionsinformation.
De största teknologiska utmaningarna gäller fordonens kapacitet att förstå och visualisera sin omgivning i svåra förhållanden såsom vid snö eller regn eller när omgivningen förändras efter tiden på dygnet och årstiden. Systemet måste fungera likadant även i svåra förhållanden. Detta ställer höga krav på sensorerna och beräkningsmetoderna, vilket gör det ytterst viktigt att studera nuvarande metoder och olösta frågor inom ämnesområdet.
Bilen behöver flera sinnen
En självkörande bil måste kunna förstå och tolka sin omgivning utifrån observationer som görs av sensorerna. All nyttig information från sensorerna behöver plockas ut för att garantera en smidig och säker färd och för att samla in användbar positionsinformation.
Man kan lätt jämföra det autonoma systemets iakttagelseförmåga med mänsklig perception: om en människa bara använder ett sinne begränsas perceptionen. En människa som använder flera sinnen får en säkrare uppfattning om sin omgivning. Likaså kan beräkningsmetoderna lättare bidra till en säkrare uppfattning om världen ifall det finns flera olika sensortyper som mäter fysikaliska storheter med mätmetoder som kompletterar varandra.
Sensorinformationen kan fusioneras så att mätningar från olika typer av sensorer blir lätta att behandla. Det enklaste sättet är att omvandla mätningarna inom ett gemensamt koordinatsystem.

Omgivningen måste kunna tolkas
När man vill kategorisera olika objekt i omgivningen används ofta ett gemensamt koordinatsystem. Viktiga kategorier för iakttagelserna av vägmiljön är t.ex. personbilar, fotgängare, cyklister, trafikljus, vägmärken och körfältslinjer. Bland många bra metoder för kategorisering av objekt i omgivningen kan självlärande algoritmer såsom neuronnät anses ha den högsta prestandan.
Under maskininlärningen matas algoritmen med en stor mängd sensorinformation där objekt i önskade kategorier har identifierats och markerats av människor. Av denna information lär sig algoritmen vad som särskiljer kategorierna.
De flesta maskininlärningsmetoder som används för kategorisering, t.ex. neuronnät med konvolution, kan lära sig nyttiga särdrag redan från några hundra övningsexempel som människor har kategoriserat. En allmän egenskap hos maskininlärningsmetoder är att precisionen ökar i takt med att inlärningsmaterialet blir större. Att skapa ett stort och omfattande material är alltså mycket betydelsefullt när man ska förbättra systemets noggrannhet och tillförlitlighet, vilket är viktigt för säker användning av självkörande fordon.

Positionen måste bestämmas tillräckligt exakt
Med hjälp av GPS-satelliter kan fordonets position i genomsnitt anges inom några meters radie från den verkliga positionen. Detta räcker utmärkt för ruttnavigering, då man behöver veta fordonets ungefärliga position i förhållande till de trafikleder och korsningar som utgör rutten.
Noggrannheten i satellitbaserad positionsbestämning räcker dock inte för självkörande fordon och insamling av högkvalitativ positionsinformation, utan man behöver ta hjälp av andra bestämningsmetoder. Målet är att veta positionen så exakt att fordonet tryggt kan hålla sig i sin körfil utan att man behöver befara en utkörning mot kantstenar eller hinder. Syftet är också att realtidsinformation från sensorerna ska kunna användas för precisionskrävande tillämpningar av positionsinformation.
Självkörande bilar använder SLAM (Simultaneous Localization and Mapping) som en metod för att samtidigt både bestämma objektets position och kartlägga omgivningen. Information från fordonets laserskannrar, kameror och övriga sensorer används för att simultant avgöra fordonets proportionella rörelse och rita en karta över närområdet utifrån sensormätningarna.
Fordonets position räknas ut från sensorobservationer som följer efter varandra, vilket gör ackumulerade sensormätfel till en relevant osäkerhetskälla när körsträckan ökar. Storleken hos ett ackumulerat positionsfel beror i huvudsak på sensorns mätprecision, som i t.ex. laserskannrar för självkörande bilar är ett par centimeter inom hundra meter, vilket anses bra.
Positionsfel minimeras med algoritmer och mätmetoder
Kartbaserade algoritmer kan effektivt minimera positionsfel så att felet blir nästan obefintligt. Då behövs det inte nödvändigtvis några satelliter för positionsbestämningen. SLAM-metoderna är särskilt användbara för att bestämma fordonens position i tunnlar och byggd miljö, där satellitbaserad positionsbestämning har sämre noggrannhet på grund av signalernas svaghet.
I autonoma system används flera stödmetoder för att öka positionsbestämningens säkerhet och noggrannhet. Kombination av t.ex. satellitnavigation, accelerationsbaserad tröghetsnavigering och SLM-metoder ger en positionsbestämningsmetod som behåller sin noggrannhet även i svåra miljöer.
Positionsvärden som enskilda metoder ger kombineras ofta så att man får ett sammansatt värde. Detta sker med en matematisk modell som minimerar felen i enskilda mätningar.
Matematiska modeller såsom partikel- eller Kalmanfilter skapar en förenklad teoretisk modell av mätobjektets dynamik. När fordonets position bestäms kan modellen t.ex. använda information om fordonets typiska accelerationer samt begränsningar i styrningsgeometrin.
Modellen syftar till att ge varje mäthändelse ett uppskattat tillförlitlighetsvärde. Därmed viktas det slutliga positionsvärdet med de enskilda mätningarnas tillförlitlighetsvärden. Uppenbart felaktiga mätningar kan då filtreras bort från gruppen av kuranta mätningar. Utöver positionsvärdet räknar modellerna ut ett nyckeltal för tillförligheten hos positionsinformationen så att systemet kan styras ändamålsenligt då ett fel uppstår.